Worked example
Irreversible Investment — model_irrcap
This example, the first in the paper, applies OccBin to an RBC model
in which investment cannot fall below a fixed fraction of its steady-state
level. It illustrates the complete workflow: two .mod files,
a constraint string, a shock sequence, and the resulting IRF chart.
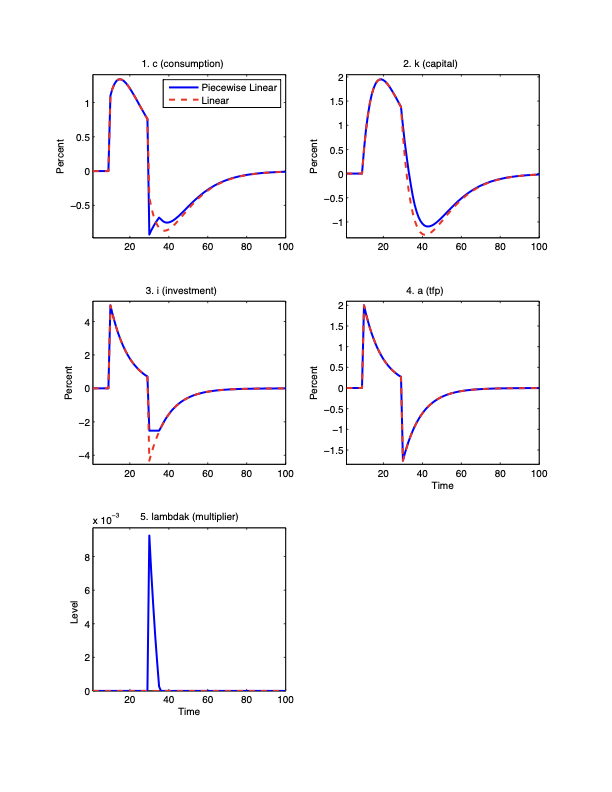
Impulse responses to a positive TFP shock at period 10 and a negative shock at period 30. Blue: piecewise-linear (OccBin). Red: linear (ignoring constraint). When investment is forced to its floor, the piecewise solution diverges sharply from the linear one.
The model and its constraint
The model is a standard RBC model with a capital adjustment cost
(PSI) and a Lagrange multiplier lambdak
on the investment floor. In the reference regime
(constraint not binding), the multiplier is zero: lambdak = 0.
In the alternative regime (constraint binding),
investment is pegged to its lower bound:
i = log(PHII · ISS).
The occasionally binding constraint is It ≥ φ · Iss, or in log-deviation form: ĩt ≥ log(φ). The constraint is violated — and regime switches — when the linear solution produces investment below this floor.
Variables in both .mod files:
| Variable | Description |
|---|---|
| a | Total factor productivity (log) |
| c | Consumption (log) |
| i | Investment (log) |
| k | Capital (log, end of period) |
| kprev | Lagged capital, defined as k(-1) |
| lambdak | Lagrange multiplier on the investment floor |
The two .mod files
The reference file dynrbc.mod sets
lambdak = 0 (equation 4 below). The alternative
file dynrbcirr_i.mod is an exact replica except
that equation 4 is replaced by
i = log(PHII · ziss), enforcing
the investment floor. All other equations and the parameter list
are identical.
// dynrbc.mod — reference regime (constraint not binding)
var a, c, i, k, kprev, lambdak;
varexo erra;
parameters ALPHA, DELTAK, BETA, GAMMAC, RHOA, PHII, PHIK, PSI, PSINEG, ISS, KSS;
model;
// 1. Euler equation (capital)
-exp(c)^(-GAMMAC)*(1+2*PSI*(exp(k)/exp(k(-1))-1)/exp(k(-1)))
+ BETA*exp(c(1))^(-GAMMAC)*((1-DELTAK)
-2*PSI*(exp(k(1))/exp(k)-1)*(-exp(k(1))/exp(k)^2)
+ALPHA*exp(a(1))*exp(k)^(ALPHA-1))
= -lambdak + BETA*(1-DELTAK+PHIK)*lambdak(1);
// 2. Resource constraint
exp(c)+exp(k)-(1-DELTAK)*exp(k(-1))+PSI*(exp(k)/exp(k(-1))-1)^2
= exp(a)*exp(k(-1))^ALPHA;
// 3. Investment definition
exp(i) = exp(k)-(1-DELTAK)*exp(k(-1));
// 4. Reference regime: multiplier is zero
lambdak = 0;
// 5. TFP process
a = RHOA*a(-1) + erra;
kprev = k(-1);
end;// dynrbcirr_i.mod — alternative regime (investment at floor)
// Identical to dynrbc.mod except equation 4:
// 4. Alternative regime: investment is pinned to its lower bound
i = log(PHII*ziss);var, varexo,
and parameters declaration must appear in the same order
in both files. Only the binding-regime equation changes.
Parameter values
Parameter values are set in paramfile_dynrbc.m,
loaded by the Dynare steady-state file at parse time.
BETA = 0.96; % discount factor
ALPHA = 0.33; % capital share
DELTAK = 0.10; % depreciation rate
GAMMAC = 2; % inverse elasticity of substitution
RHOA = 0.9; % TFP persistence
PHII = 0.975; % investment floor as fraction of I_ss
PSI = 0; % capital adjustment cost (zero here)The toolkit computes steady-state capital and investment from these primitives: Kss = ((1/β − 1 + δ) / α)1/(α−1), Iss = δ Kss.
Setting up and calling the solver
The script runsim_irrcap.m specifies the shock
sequence and calls solve_one_constraint. Here,
a positive 2% TFP shock hits at period 10 and a symmetric
negative shock at period 30, over a 100-period horizon.
clear
global M_ oo_
modnam = 'dynrbc'; % reference regime .mod file
modnamstar = 'dynrbcirr_i'; % alternative regime .mod file
% Constraint string (in deviation from steady state)
constraint = 'i<log(PHII)'; % switch to alt. regime when i hits floor
constraint_relax = 'lambdak<0'; % return to ref. regime when multiplier goes negative
irfshock = char('erra'); % TFP innovation
shockssequence = zeros(60,1);
shockssequence(10) = 0.02; % positive shock at period 10
shockssequence(30) = -0.02; % negative shock at period 30
nperiods = 100;
maxiter = 10;
[zdatalinear, zdatapiecewise, zdatass, oobase_, Mbase_] = ...
solve_one_constraint(modnam, modnamstar, ...
constraint, constraint_relax, ...
shockssequence, irfshock, nperiods, maxiter);Unpacking and plotting results
After the solver returns, the script unpacks the output arrays
into named workspace variables using a loop over the endogenous
variable list, then calls makechart to plot
piecewise-linear and linear paths side by side.
% Unpack all endogenous variables from the output matrices
for i = 1:Mbase_.endo_nbr
eval([Mbase_.endo_names{i}, '_l = zdatalinear(:,i);']);
eval([Mbase_.endo_names{i}, '_p = zdatapiecewise(:,i);']);
eval([Mbase_.endo_names{i}, '_ss = zdatass(i);']);
end
% Build chart inputs
titlelist = char('c (consumption)','k (capital)','i (investment)', ...
'a (tfp)','lambdak (multiplier)');
ylabels = char('Percent','Percent','Percent','Percent','Level');
legendlist = cellstr(char('Piecewise Linear','Linear'));
line1 = 100*[c_p, k_p, i_p, a_p, (lambdak_p + lambdak_ss)/100];
line2 = 100*[c_l, k_l, i_l, a_l, (lambdak_l + lambdak_ss)/100];
makechart(titlelist, legendlist, '', ylabels, line1, line2)lambdak turns positive during the
binding episodes, signalling that the constraint is active.